
A Stepper motor which is also known as step motor or stepping, is a brush less DC electric motor that divides a full rotation \into a number of equal steps. The motor’s position can be commanded to move and hold at one of these step without any position sensor for feedback, as long as the motor is correctly sized to the application in respect to torque and speed.

Mechanism
Brushed DC motor rotate continuously when DC voltage is applied to their terminals and the stepper motor is known for its property of converting a train of input pulses i.e typically square waves into a precisely defined increment in the shaft’s rotation position. Each pulse rotates the shaft through a fixed angle.
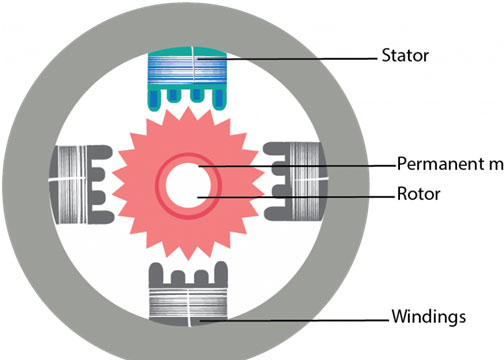
Stepper motors effectively have multiple toothed electromagnets arranged as a stator around a central rotor and a gear shaped piece of iron. The electromagnets are energized by an external driver’s circuit or a micro controller. To make the motor shaft turn, one electromagnet is given power which magnetically attracts the gear’s teeth. When the gear’s teeth are aligned to the first electromagnet and they slightly offset from the next electromagnet which means that when the next electromagnet is turned on and the first is turned off then the gear rotates slightly to align with the next one. From there the process is repeated. Each of those rotations is called a “step”, with an integer number of steps making a full rotation.

Example such as, if the stepper motor has two group identified as A or B, and ten electromagnets in total , then the grouping pattern will be ABABABABABAB. Electromagnets within the same group are all energized together. Because of this stepper motor with more phases typically have more wire or lead to control the motor.
There are three type of stepper motor
- Permanent magnet stepper
- Variable reluctance stepper
- Hybrid synchronous stepper
Application
- Computer controlled stepper motor is a type of motion control positioning system. They are typically digitally controlled as a part of an open loop system for use in holding or positioning application.
- In the field of laser and optics they are frequently used in precision positioning equipment such as linear actuator, linear stages, rotation stages, magnetometers and mirror mount
- This can use in packaging machinery and positioning of valve pilot stages for fluid control system
- Stepper motor are used in floppy disk drives, flatbed scanners, computer printer, plotter, CNC, etc.