Introduction
EtherCAT stands for “Ethernet for Control Automation Technology.” It is an Ethernet-based technology designed specifically for industrial automation systems.
It can process 1000 I/O points in 30 microseconds and communicate with 100 servo axes in just 100 microseconds. These servo axes are synchronized using a distributed clock method—a simplified version of IEEE 1588—that reduces jitter to less than 1 microsecond. Because messages are processed in hardware before being sent to the next slave, EtherCAT delivers exceptionally fast performance.
Fundamental Principle
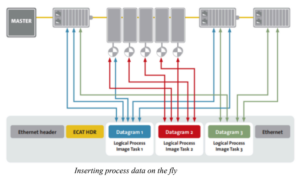
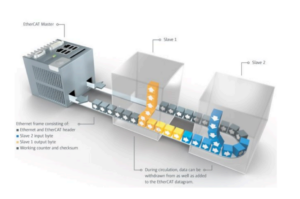
The fundamental principle of EtherCAT is pass-through reading. Messages are not meant for a single node but are passed through the network as each node processes them. While the message passes, a node reads its input data and inserts its output data into the same message before forwarding it to the next node.
The EtherCAT Master sends a single message containing data for all nodes. Each node extracts the data intended for it and adds its response as the message travels back to the master. This allows the network to utilize maximum bandwidth without redundant small packets, ensuring high efficiency. The process can be compared to a railway, where each station loads and unloads goods as the train passes through.
The EtherCAT Protocol
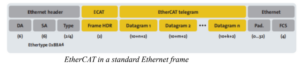
EtherCAT’s payload is embedded in a standard Ethernet frame and identified by the EtherType field (0x88A4). Designed for short cyclic process data, EtherCAT eliminates the need for bulky protocol stacks like TCP/IP or UDP/IP.
TCP/IP communication can be tunneled through a mailbox channel without affecting real-time data transfer. During startup, the master configures and maps process data on slave devices, which may range from single bits to kilobytes.
Each EtherCAT frame contains one or more Datagrams. The Datagram header defines whether the master wants to perform a read, write, or read-write operation. Logical addressing is used for cyclical data exchange, allowing multiple slave devices to share address spaces. This results in extremely efficient communication cycles.
Unlike traditional fieldbus systems, EtherCAT allows the master to send a single frame that contains all output data. The frame is transmitted via DMA to the MAC controller without CPU intervention, which reduces latency and boosts performance.
How Does EtherCAT Work?
EtherCAT communicates using standard Ethernet frames containing headers, telegrams (datagrams), and checksums. It operates on a master-slave architecture, where the master sends control (target) data to the slaves and receives feedback (actual) data.
Each slave extracts the data meant for it while simultaneously inserting its response. The remaining data continues downstream, and the entire datagram returns to the master in a single circulation. This high-speed exchange, achieved in nanoseconds per node, enables real-time communication with refresh rates of several kilohertz.
Ethernet vs EtherCAT
Standard Ethernet is not ideal for industrial applications because it handles multiple address-based data frames, consuming significant bandwidth. EtherCAT, however, uses the same physical and data link layers as Ethernet but employs a different protocol designed for real-time performance.
In EtherCAT, the master sends a single frame that travels through all nodes, with each node forwarding it downstream. Only the master can send frames, ensuring deterministic, delay-free operation—essential for industrial automation.
Advantages of EtherCAT
- Ideal for motion control applications with deterministic performance.
- Supports flexible topologies like line, star, tree, bus, and ring.
- Compatible with CANopen and Sercos drive profiles.
- Provides high speed, low data traffic, and precise clock synchronization.
- Reduces hardware costs and CPU load through DMA-based data exchange.
- Allows easy optimization within cycle time limits.
Disadvantages of EtherCAT
- Slave devices require specialized ASIC hardware to run EtherCAT.
- The data model is complex and challenging to understand for beginners.
Applications of EtherCAT
Thanks to its performance, simplicity, and reliability, EtherCAT is widely used in industrial and embedded systems such as:
- Machine tools and robotics
- Printing and packaging machines
- Power plants and substations
- Welding and measurement systems
- Wind turbines and cranes
- Medical and automotive equipment
- Stage and tunnel control systems
EtherCAT is a real-time, open communication system that ensures robust performance in automation industries worldwide.
In summary, EtherCAT delivers ultra-fast, synchronized, and flexible networking for industrial automation, making it one of the most efficient industrial Ethernet technologies available today.